Short Overview: This video shows an experimental validation of rigidity-based kinematic translational maneuvering control of Barrera, Armando Serrato, Aurelio López-López, and Gustavo Rodríguez Gómez.
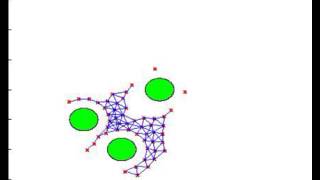
Multi Agent Dynamic System Flocking With Obstacles -
This video shows an experimental validation of rigidity-based kinematic translational maneuvering control of Barrera, Armando Serrato, Aurelio López-López, and Gustavo Rodríguez Gómez.
Important details found
- This video shows an experimental validation of rigidity-based kinematic translational maneuvering control of
- Barrera, Armando Serrato, Aurelio López-López, and Gustavo Rodríguez Gómez.
Why this topic is useful
The goal of this page is to make Multi Agent Dynamic System Flocking With Obstacles easier to scan, compare, and understand before opening related resources.
Sponsored
Frequently Asked Questions
What should readers check next?
Readers should check related pages, official references, or updated sources when details matter.
Why are related topics included?
Related topics help readers compare nearby references and understand the broader subject.
What is this page about?
This page summarizes Multi Agent Dynamic System Flocking With Obstacles and connects it with related entries, references, and supporting context.
Reference Gallery









Sponsored
